-

深圳市途亮交通设施有限公司
主营:热熔标线施工,东莞停车位划线,东莞道路划线,深圳道路划线,东莞工厂车间划线,东莞停车场系统

深圳市途亮交通设施有限公司
主营:热熔标线施工,东莞停车位划线,东莞道路划线,深圳道路划线,东莞工厂车间划线,东莞停车场系统 9
9
车牌识别系统(Vehicle License Plate Recognition,VLPR) 是计算机视频图像识别技术在车辆牌照识别中的一种应用。车牌识别在高速公路车辆管理中得到广泛应用,电子收费(ETC)系统中,也是结合DSRC技术识别车辆身份的主要手段。
车牌识别技术要求能够将运动中的汽车牌照从复杂背景中提取并识别出来,通过车牌提取、图像预处理、特征提取、车牌字符识别等技术,识别车辆牌号、颜色等信息,目前较新的技术水平为字母和数字的识别率可达到99.7%,汉字的识别率可达到99%。
在停车场管理中,车牌识别技术也是识别车辆身份的主要手段。在深圳市**建设的《停车库(场)车辆图像和号牌信息采集与传输系统技术要求》中,车牌识别技术成为车辆身份识别的主要手段。
车牌识别技术结合电子不停车收费系统(ETC)识别车辆,过往车辆通过道口时无须停车,即能够实现车辆身份自动识别、自动收费。在车场管理中,为提高出入口车辆通行效率,车牌识别针对*收停车费的车辆(如月卡车、内部免费通行车辆),建设无人值守的快速通道,免取卡、不停车的出入体验,正改变出入停车场的管理模式。专业提供停车场车牌识别系统定做及维护安装,欢迎来电咨询!
采用计算机视觉技术识别车牌的流程通常都包括车辆图像采集,车牌定位,字符分割,光学字符识别,输出识别结果5个步骤。车辆图像的采集方式决定了车牌识别的技术路线。国际ITS通行的两条主流技术路线是自然光和红外光图像采集识别。自然光和红外光不会对人体产生不良的心理影响,也不会对环境产生新的电子污染,属于绿色环保技术。
自然光路线是指白天利用自然光线,夜间采用辅助照明光源,用彩色摄像机采集车辆真彩色图像,用彩色图像分析处理方法识别车牌。自然光真彩色识别技术路线,与人眼感光习惯一致,并且,真彩色图像能够反映车辆
应用
及其周围环境真实的图像信息,不仅可以用来识别车牌照,而且可以用来识别车牌照颜色、车流量、车型、车颜色等车辆特征。用一个摄像机采集的图像,同时实现所有前端基本视频信息采集、识别和人工辅助图像取证判别,可以前瞻性的为未来的智能交通系统工程预留接口。
红外光路线是指利用车牌反光和红外光的光学特性,用红外摄像机采集车辆灰度图像,由于红外特性,车辆图像上几乎只能看见车牌,然后用黑白图像处理方法识别车牌。950nm的红外照明装置可抓拍到很好的反光车牌照图像。因红外光是不可见光,它不会对驾驶员产生视觉影响。另外,红外照明装置提供的是不变的光,所抓拍的图像都是一样的,不论是在一天中较明亮的时候,还是在一天中较暗的时候。一的例外是在白天,有时会看到一些牌照周围的细节,这是因为晴朗天气时太阳光的外光波的影响。采用红外灯的缺点就是所捕获的车牌照图像不是彩色的,不能获取整车图像,并且严重依赖车牌反光材料。我们专业提供东莞深圳停车场车牌识别系统定做及维护安装,欢迎来电咨询!
车牌识别系统
1、间接法:指通过识别安装在汽车上的IC卡或条形码中所存储的车牌的信息来识别车牌及相关信息。IC卡技术识别准确度高,运行可靠,可以全天候作业,但它整套装置价格昂贵,硬件设备十分复杂,不适用于异地作业;条形码技术具有识别速度快、准确度高、可靠性强以及成本较低等优点,但是对于扫描器要求很高。此外,二者都需要制定出全国统一的标准,并且无法核对车、条形码是否相符,也是技术上存在的缺点,这给在短时间内推广造成困难。
2、直接法:基于图像的车牌识别技术属于直接法,是一种无源型汽车牌照智能识别方法,能够在无任何**发送车牌信号的车载发射设备情况下,对运动状态车辆或静止状态车辆的车牌号码进行非接触性信息采集并实时智能识别。与间接法识别系统相比,首先,这种系统节省了设备安置及大量资金,从而提高了经济效益;其次,由于采用了先进的计算机应用技术,所以可提高识别速度,较好地解决实时性问题;再次,它是根据图像进行识别,所以通过人的参与可以解决系统中的识别错误,而其他方法是难以与人交互的。
直接法一般有图像处理技术,传统模式识别技术及人工神经网络技术。
1、图像处理技术:运用图像处理技术解决汽车牌照识别的研究较早始于80年代,但国内外均只是就车牌识别中的某一个具体问题进行讨论,并且通常仅采用简单的图像处理技术来解决,并没有形成完整的系统体系,识别过程是使用工业电视摄像机拍下汽车的工前方图像,然后交给计算机进行简单的处理,并且较终仍需要人工干预,例如车辆牌照中省份汉字的识别问题,1985年有人利用常见的图像处理技木方法提出汉字识别的分类是在抽取汉字特征的基础上进行的,根据汉字的投影直方图选取浮动闭值,抽取汉字在竖直方向的峰值,利用树形查表法进行汉字的粗分类;然后根据汉字在水平方向的投影直方图,选取适当闭值,进行量化处理后,形成一个变长链码,再用动态规划法,求出与标准模式链码的较小距离,实现细分米完成汉字省名的自动识别。
2、传统模式识别技术。传统模式识别技术指结构特征法,统计特征法等。90年代,由于计算机视觉技术的发展,开始出现汽车牌照识别的系统化研究。1990年AS.Johnson等运用计算机视觉技术和图像处理技术实现了车辆牌照的自动识别系统。该系统分为图像分割、特征提取和模板构造、字符识别等三个部分。利用不同闽值对应的直方图不同,经过大量统计实验确定出车牌位置的图像直方图的闽值范围,从而根据特定闽值对应的直方图分割出车牌,再利用预先设置的标准字符模板进行模式匹配识别出字符。
3、人工神经网络技术。近几年来,计算机及相关技术发达的一些国家开始探讨用人工神经网络技术解决车牌自动识别问题,例如1994年M.M.M.FANHY等就成功地运用了BAM神经网络方法对车牌上的字符进行自动识别,BAM神经网络是由相同神经元构成的双向联想式单层网络,每一个字符模板对应着一个BAM矩阵,通过与车牌上的字符比较,识别出正确的车牌号码。
这种采用BAM神经网络方法的缺点是无映解决识别系统存储容量和处理速度相矛盾的问题。我们专业提供东莞深圳停车场车牌识别系统定做及维护安装,欢迎来电咨询!
选购准则
重视稳定度
随着产品算法与业者的技术提升,整合早就不是重要的话题,现阶段较需要注意的重点反而是“稳定度”。稳定度的定义是:在一个既定的车速范围内,不会让必须达到的准确度,因外在环境影响而产生过大的误差。
例如一个车牌系统在白天有90%以上的准确度,到了傍晚就降到80%,夜间又降到70%,这种不稳定的系统,比起全天候平均拥有70%准确度的车牌辨识系统更难于整合。因为使用者会认为,既然白天的辨识率有90%,那全天候的准确率都要达到90%才合理,这样的规格还不包括奇怪的环境干扰(暴雨袭击、冰雹、浓雾区段等),与架设环境限制(高度限制、风大摇晃限制、不容易遭受人为破坏等)。
确实实测
几乎每家都宣称拥有高辨识率,但为了避免事后因为双方对产品认知有差异,而将运作不良的责任互相推托,用户在采购车牌辨识系统时,不妨要求实地测试,而且测试时间较好**过两个礼拜,比较能判断辨识结果是否“言过其实”。因为多变的环境,两个礼拜应该可以对于场域可能影响辨识率的情形,大约掌握了八成,如果只是测一天、甚至几个小时,是无法了解的。
另外,车牌辨识既然是“系统”,当中软硬件架构的好坏,当然会影响“呈现的结果”。至于什么样的软件跟硬件,适合什么样的环境,这就必须因环境而异,因为不同的应用环境,对于辨识率的要求未必相同,而这就必须靠经验累积。
尽管市场上有林林总总的车牌辨识系统,用对产品与架构,可以省去很多的冤枉钱跟时间,但更重要的是,工程商与系统整合商需要多方配合及了解,而不是一味的只看重某厂牌比较好、比较便宜,凡事货比三家不吃亏。
此外,车牌辨识系统能否发挥较大效用,除了软件技术之外,与摄影机及现场施工能力,也有很大的关系。使用者可要求厂商至现场勘查后,提出建置规划方案,先评估应该架设的地点、摄影机架设角度、是否需要架设辅助光源等,再提出报价,藉由这些动作,除了得以事先评估业者的能力,用户本身也可以达到产品学习及教育训练,日后管理时,会更清楚知道该产品的使用限制及相关因应措施。我们专业提供东莞深圳停车场车牌识别系统定做及维护安装,欢迎来电咨询!
在车牌识别设备安装前,要对项目现场进行详细的勘察,了解客户需求,制定完善的施工流程,那么勘察现场,安装流程应该侧重哪些因素呢?
4、手机实现车位预定、支付、寻车等功能,智能手机和移动互联网这两年快速普及,移动互联网用户已经**过了固定互联网用户,利用手机订餐、购买电影票、下载优惠券、交友
等已经普及,所以停车场中的这些应用将快速普及。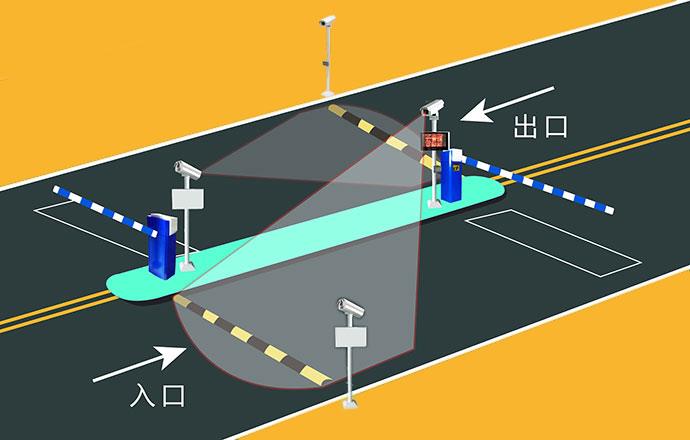
如果使用视频识别模式,则*安装地感线圈和车检器。
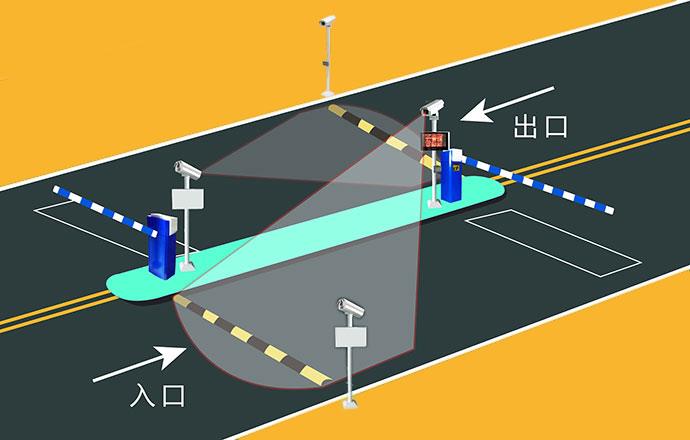
一套完整的车牌识别系统包含车牌识别一体机、停车场收费显示屏、智能道闸、车牌识别软件等。这些设备的安装是否规范,很大程度上影响着整套车牌识别系统的工作性能。
在车牌识别设备安装前,要对项目现场进行详细的勘察,了解客户需求,制定完善的施工流程,那么勘察现场,安装流程应该侧重哪些因素呢?
1、车牌识别主要设备的安装
1)首先要确定车牌识别一体机的安装位置,这会直接影响车牌识别效果,需根据每个出入口的现场环境和条件来决定,一般一条车道安装一台相机,如果车驶入车道时方向不固定
,则角度太大时会影响识别,就要考虑安装副相机,以保证车头不管偏向哪边都可以识别。
2)其次如果使用抓拍识别,则需确定相机和线圈的安装位置:相机距线圈来车方向一侧较佳距离4-4.5m。线圈的位置应保证车辆触发车检器时车头方向尽量偏向相机一侧,这样可
以使相机拍到清晰、完整的图片。如果是单通道(进口和出口是同一车道),需要使用双路车检器。
如果使用视频识别模式,则*安装地感线圈和车检器。
3)然后确定道闸和防砸线圈的位置:道闸一般安装在相机同侧,位于相机后面(与相机立杆距离30cm安装,保证道闸门可以方便的开启)。防砸线圈的位置在道闸杆正下方居中,
要保证车头触发线圈时和车尾离开线圈时,车身的任何部分都不在道闸杆下方。
4)相机和道闸要安装在结实的地面上,如果地面是砖或沥青,要考虑破路面浇筑水泥墩来增加稳定性。
上述设备在安装前,要确定好线路的走线方式,根据设备安装位置,提前预留穿线管。为保证不因为车速影响识别效果,建议安装减速带控制车速。